(좌부터) 홍성훈 교수, 윤석민 한화시스템 수석연구원, 이로운 계명대 석사 졸업생(현 Riibotics 재직)
(좌부터) 홍성훈 교수, 윤석민 한화시스템 수석연구원, 이로운 계명대 석사 졸업생(현 Riibotics 재직)
계명대학교(총장 신일희) 로봇공학과 홍성훈 교수 연구팀이 사족보행로봇의 자율주행 성능을 획기적으로 높일 수 있는 핵심 기술을 개발하며 로봇 공학 분야에서 세계적인 주목을 받고 있다.
홍 교수 연구팀은 최근 시야가 제한된 라이다(LiDAR) 센서를 장착한 사족보행로봇이 자신의 위치를 정확히 파악하고 지도를 작성하는 ‘SLAM(Simultaneous Localization And Mapping)’ 기술을 개발하는 데 성공했다.
이번 연구 성과는 로봇 및 인공지능 분야의 국제 저명 학술지인 ‘로보틱스 앤 오토노머스 시스템즈(Robotics and Autonomous Systems)’에 게재되며 그 우수성을 입증받았다.
라이다는 레이저를 이용해 주변 환경을 3차원으로 인식하는 로봇의 ‘눈’ 역할을 하는 핵심 센서다. 최근 작고 가벼운 고정형 라이다가 사족보행로봇에 많이 쓰이고 있지만, 회전형에 비해 시야각이 좁아 로봇이 이전에 왔던 장소를 다시 인식하지 못하는 등 자율주행의 안정성이 떨어지는 고질적인 문제가 있었다.
홍 교수팀은 이 문제를 해결하기 위해 로봇의 ‘발끝’에 주목했다. 로봇이 경사면이나 계단을 오를 때 발생하는 발의 접촉 정보와 보행 패턴을 분석해 지형을 재구성하는 방식을 도입한 것이다. 이는 센서의 좁은 시야에만 의존하던 기존 방식에서 벗어나, 로봇이 직접 발로 느끼는 지형 정보를 결합해 자신의 위치를 더욱 정밀하게 찾아낼 수 있도록 한 혁신적인 접근법이다.
이번 성과는 단순한 학술적 가치를 넘어 산학 협력과 인재 양성 측면에서도 큰 의미를 지닌다. 한화시스템과의 긴밀한 협력을 통해 현장 중심의 연구를 수행했으며, 특히 계명대 학부와 대학원을 졸업한 이로운 연구원(현 Riibotics 재직)이 제1저자로 참여해 지역 인재의 역량을 세계에 알렸다.
홍성훈 교수는 “사족보행로봇 고유의 보행 특성과 지형 간의 상호작용을 활용해 기존 센서가 가진 물리적 한계를 극복했다는 점이 이번 연구의 핵심”이라며, “우리 대학 출신 졸업생이 제1저자로 세계적 수준의 학술지에 이름을 올리게 되어 더욱 뜻깊다”고 소감을 밝혔다.
이 기술은 향후 재난 구조나 시설 점검 등 복잡한 지형에서 활동해야 하는 이동 로봇의 자율 주행 성능을 높이는 데 널리 활용될 것으로 기대된다.




 붉은 달 뜨는 정월대보름…달서·달성 곳곳서 달집 태우고 소망 빈다
붉은 달 뜨는 정월대보름…달서·달성 곳곳서 달집 태우고 소망 빈다
 달서구 이곡2동 ‘정나눔 봉사단’ 독립유공자·저소득가정 소고기 30만 원 상당 후원
달서구 이곡2동 ‘정나눔 봉사단’ 독립유공자·저소득가정 소고기 30만 원 상당 후원
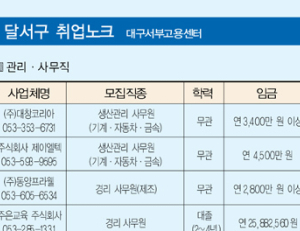 달서구 취업노크_대구서부고용센터
달서구 취업노크_대구서부고용센터
 죽전동 10년 맛집 ‘불황 속에서도 빛난 진심’
죽전동 10년 맛집 ‘불황 속에서도 빛난 진심’
 [건강칼럼] 난임, 건강한 몸 만들기부터 출발!
[건강칼럼] 난임, 건강한 몸 만들기부터 출발!
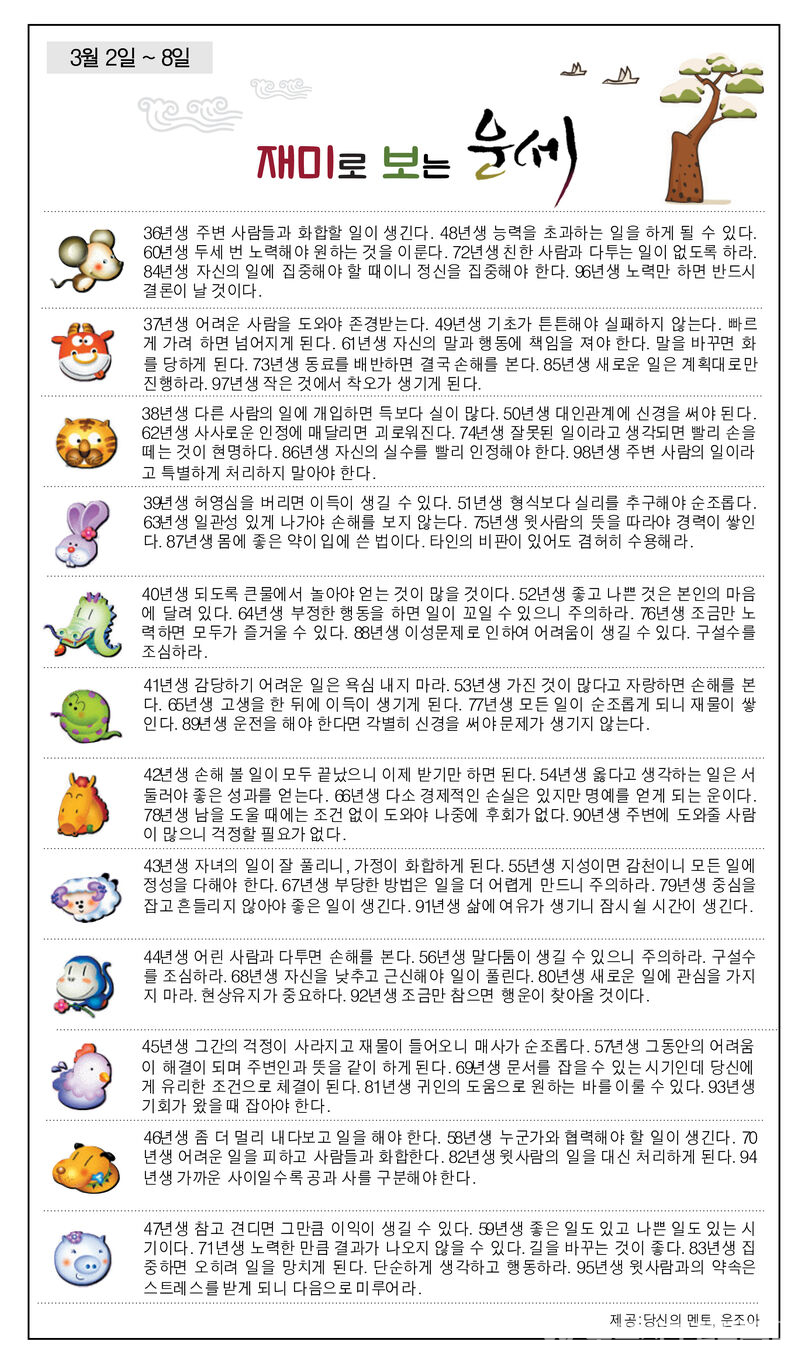 재미로 보는 운세(3월 2일~8일)
재미로 보는 운세(3월 2일~8일)
 목록
목록